自动驾驶KITTI数据集
 江湖有雨
江湖有雨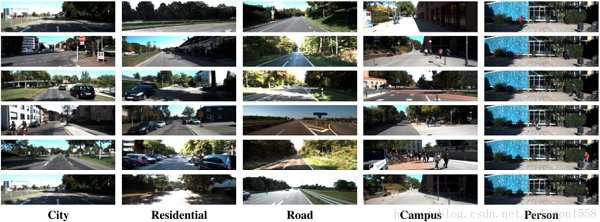
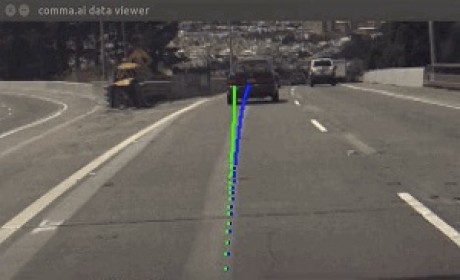
 数据集内容:目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能
数据集内容:目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能
KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统
数据集数量: 每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2km视觉测距序列以及超过200k 3D标注物体的图像组成,以10Hz的频率采样及同步
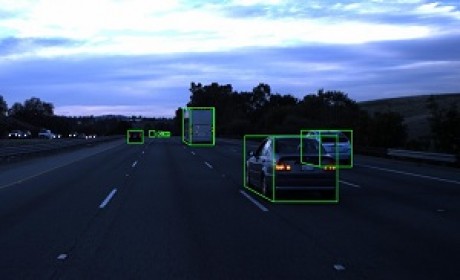
数据集功能:目标检测包括了车辆检测、行人检测、自行车三个单项,目标追踪包括车辆追踪、行人追踪两个单项,道路分割包括urban unmarked、urban marked、urban multiple marked三个场景及前三个场景的平均值urban road等四个单项
下载链接:http://www.cvlibs.net/datasets/kitti/index.php
彩蛋1:
算法工程师开发重磅福利:
(1)算法工程师模型部署利器,算法开发平台,安卓手机即可使用,点击查看体验。
(2)智慧安防、智慧交通、智慧社区实战训练营,点击加入。
彩蛋2:
大白购买了不少数据集,以及不断整理各种类型的数据集,放到百度网盘中,便于大家下载使用。
数据集列表及下载方式:点击查看
彩蛋3:
《AI未来星球》陪伴成长的人工智能社群,价值过万的各种内部资源及活动,限时特惠中,点击查看。